GPS(Global Positioning System)即全球定位系統(tǒng)�,是由美國建立的一個衛(wèi)星導(dǎo)航定位系統(tǒng)�����,利用該系統(tǒng)�,用戶可以在全球范圍內(nèi)實(shí)現(xiàn)全天候、連續(xù)��、實(shí)時的三維導(dǎo)航定位和測速;另外�����,利用該系統(tǒng)�����,用戶還能夠進(jìn)行高精度的時間傳遞和高精度的精密定位。
現(xiàn)實(shí)生活中��,GPS定位主要用于對移動的人���、寵物����、車及設(shè)備進(jìn)行遠(yuǎn)程實(shí)時定位監(jiān)控的一門技術(shù)����。GPS定位是結(jié)合了GPS技術(shù)、無線通信技術(shù)(GSM/GPRS/CDMA)�����、圖像處理技術(shù)及GIS技術(shù)的定位技術(shù)���,主要可實(shí)現(xiàn)如下功能:
1.跟蹤定位
監(jiān)控中心能全天侯24小時監(jiān)控所有被控車輛的實(shí)時位置、行駛方向��、行駛速度�����,以便最及時的掌握車輛的狀況。
2.軌跡回放
監(jiān)控中心能隨時回放近60天內(nèi)的自定義時段車輛歷史行程���、軌跡記錄�����。(根據(jù)情況���,可選配軌跡DVD刻錄服務(wù))
3.報警(報告)
3.1,超速報警:車輛行駛速度超出監(jiān)控中心預(yù)設(shè)的速度時����,及時上報監(jiān)控中心
3.2,區(qū)域報警(電子圍欄):監(jiān)控中心設(shè)定區(qū)域范圍����,車輛超出或駛?cè)腩A(yù)設(shè)的區(qū)域會向監(jiān)控調(diào)度中心給出相應(yīng)的報警
3.3,停車報告:調(diào)度中心可對車輛的歷史停車記錄以文字形式生成報表����,其中描述車輛的停車地點(diǎn)、時間和開車時間等信息��,并可對其進(jìn)行打印。
3.4����,應(yīng)急報警: 一旦遇有緊急險情(如遭劫等),請馬上按動應(yīng)急報警按鈕��,向監(jiān)管中心報警��,監(jiān)管中心即刻會知道您處于緊急狀態(tài)以及您所在的位置�。經(jīng)核實(shí)后,進(jìn)入警情處置程序�,助您脫險。(注:一旦應(yīng)急報警按鈕啟動�����,此設(shè)備會立即關(guān)閉通話功能��,但短信功能正常)
3.5���,欠壓報警,當(dāng)汽車電瓶電壓過低時�,車載主機(jī)會自動向監(jiān)控中心報警,由監(jiān)控中心值班員提醒用戶及時給車輛充電��。
3.6,剪線報警�����,車輛主電瓶被破壞后或不能供電時��,內(nèi)置備用電池可維持產(chǎn)品繼續(xù)工作��,并向監(jiān)控中心發(fā)送剪線報警��。
4.地圖制作功能
根據(jù)查看需要�����,客戶可以添加修改自定義地圖線路��,以更好服務(wù)企業(yè)運(yùn)行
5.里程統(tǒng)計
系統(tǒng)利用GPS車載終端的行駛記錄功能和GIS地理系統(tǒng)原理對車輛進(jìn)行行駛里程統(tǒng)計����,并可生成報表且可打印。
6.車輛信息管理
方便易用的管理平臺���,提供了車輛�����、駕駛?cè)藛T���、車輛圖片等信息的設(shè)定���,以方便調(diào)度人員的工作。
7.短信通知功能
將被控車輛的各種報警或狀態(tài)信息在必要時發(fā)送到管理者手機(jī)上�,以便隨時隨地掌握車輛重要狀態(tài)信息。
8.車輛遠(yuǎn)程控制
監(jiān)控中心可隨時對車輛進(jìn)行遠(yuǎn)程斷油斷電�����,鎖車功能����。
9.車載電話
車載電話可以象普通手機(jī)一樣拔打電話,調(diào)度中心可對此電話進(jìn)行遠(yuǎn)程權(quán)限設(shè)置�,即呼入限制、呼出限制�����、只能呼叫指定的若干電話號碼��。
10.油耗檢測
實(shí)時監(jiān)控車輛的油耗變化��,并生成歷史時段油量變化報表或油量曲線圖����,進(jìn)而直觀反映出油量的正常消耗與非正常消耗及加油數(shù)量不足等現(xiàn)象,達(dá)到油耗高水平管理�,杜絕不良事件的發(fā)生。(需搭配油量傳感器)
11.車輛調(diào)度
調(diào)度人員確定調(diào)度車輛或者在地圖上畫定調(diào)度范圍���,GPS系統(tǒng)自動向車輛或者畫定范圍內(nèi)的所有車輛發(fā)出調(diào)度命令���,被調(diào)度車輛及時回應(yīng)調(diào)度中心,以確定調(diào)度命令的執(zhí)行情況�����。GPS系統(tǒng)還可對每輛車成功調(diào)度次數(shù)進(jìn)行月統(tǒng)計�����。
智能自檢
車載終端可以進(jìn)行自我診斷���,一旦發(fā)生故障��,就會向中心發(fā)出故障通知�,方便工作人員維修,確保設(shè)備正常工作��。
GPS計劃始于1973年 �,已于1994年進(jìn)入完全運(yùn)行狀態(tài)。GPS的整個系統(tǒng)由空間部分����、地面控制部分和用戶部分所組成:
空間部分(太空部分)
GPS的空間部分是由24顆GPS工作衛(wèi)星所組成,這些GPS工作衛(wèi)星共同組成了GPS衛(wèi)星星座�,其中21顆為可用于導(dǎo)航的衛(wèi)星,3顆為活動的備用衛(wèi)星���。這24顆衛(wèi)星分布在6個傾角為55°的軌道上繞地球運(yùn)行���。衛(wèi)星的運(yùn)行周期約為12恒星時。每顆GPS工作衛(wèi)星都發(fā)出用于導(dǎo)航定位的信號��。GPS用戶正是利用這些信號來進(jìn)行工作的�。
控制部分
GPS的控制部分由分布在全球的由若干個跟蹤站所組成的監(jiān)控系統(tǒng)所構(gòu)成,根據(jù)其作用的不同�,這些跟蹤站又被分為主控站、監(jiān)控站和注入站�����。主控站有一個,位于美國克羅拉多(Colorado)的法爾孔(Falcon)空軍基地��,它的作用是根據(jù)各監(jiān)控站對GPS的觀測數(shù)據(jù)���,計算出衛(wèi)星的星歷和衛(wèi)星鐘的改正參數(shù)等,并將這些數(shù)據(jù)通過注入站注入到衛(wèi)星中去;同時���,它還對衛(wèi)星進(jìn)行控制���,向衛(wèi)星發(fā)布指令,當(dāng)工作衛(wèi)星出現(xiàn)故障時�����,調(diào)度備用衛(wèi)星���,替代失效的工作衛(wèi)星工作;另外����,主控站也具有監(jiān)控站的功能�。監(jiān)控站有五個,除了主控站外�,其它四個分別位于夏威夷(Hawaii)�、阿松森群島(Ascension)��、迭哥伽西亞(Diego Garcia)�、卡瓦加蘭(Kwajalein),監(jiān)控站的作用是接收衛(wèi)星信號��,監(jiān)測衛(wèi)星的工作狀態(tài);注入站有三個�,它們分別位于阿松森群島(Ascension)、迭哥伽西亞(Diego Garcia)�����、卡瓦加蘭(Kwajalein)���,注入站的作用是將主控站計算出的衛(wèi)星星歷和衛(wèi)星鐘的改正數(shù)等注入到衛(wèi)星中去����。
用戶部分(地面接收)
GPS的用戶部分由GPS接收機(jī)���、數(shù)據(jù)處理軟件及相應(yīng)的用戶設(shè)備如計算機(jī)氣象儀器等所組成��。它的作用是接收GPS衛(wèi)星所發(fā)出的信號���,利用這些信號進(jìn)行導(dǎo)航定位等工作���。 以上這三個部分共同組成了一個完整的GPS系統(tǒng)。
GPS的信號
GPS衛(wèi)星發(fā)射兩種頻率的載波信號���,即頻率為1575.42MHz的L1載波和頻率為1227.60MHz的L2載波�����,它們的頻率分別是基本頻率10.23MHz的154倍和120倍,它們的波長分別為19.03cm和24.42cm����。在L1和L2上又分別調(diào)制著多種信號,這些信號主要有:
C/A碼
C/A碼又被稱為粗捕獲碼�����,它被調(diào)制在L1載波上����,是1MHz的偽隨機(jī)噪聲碼(PRN碼),其碼長為1023位(周期為1ms)�����。由于每顆衛(wèi)星的C/A碼都不一樣,因此�����,我們經(jīng)常用它們的PRN號來區(qū)分它們��。C/A碼是普通用戶用以測定測站到衛(wèi)星間的距離的一種主要的信號����。
P碼
P碼又被稱為精碼,它被調(diào)制在L1和L2載波上����,是10MHz的偽隨機(jī)噪聲碼,其周期為七天���。在實(shí)施AS時��,P碼與W碼進(jìn)行模二相加生成保密的Y碼����,此時���,一般用戶無法利用P碼來進(jìn)行導(dǎo)航定位���。
Y碼
見P碼���。
導(dǎo)航信息
導(dǎo)航信息被調(diào)制在L1載波上,其信號頻率為50Hz����,包含有GPS衛(wèi)星的軌道參數(shù)、衛(wèi)星鐘改正數(shù)和其它一些系統(tǒng)參數(shù)�。用戶一般需要利用此導(dǎo)航信息來計算某一時刻GPS衛(wèi)星在地球軌道上的位置�,導(dǎo)航信息也被稱為廣播星歷。
SPS和PPS是GPS系統(tǒng)針對不同用戶提供兩種不同類型的服務(wù)����。一種是標(biāo)準(zhǔn)定位服務(wù)(SPSStandard Positioning Service),另一種是精密定位服務(wù)(PPSPrecision Positioning Service)�����。這兩種不同類型的服務(wù)分別由兩種不同的子系統(tǒng)提供�,標(biāo)準(zhǔn)定位服務(wù)由標(biāo)準(zhǔn)定位子系統(tǒng)(SPSStandard Positioning System)提供,精密定位服務(wù)則由精密定位子系統(tǒng)(PPSPrecision Positioning System)提供�����。
SPS主要面向全世界的民用用戶。
PPS主要面向美國及其盟國的軍事部門以及民用的特許用戶���。
在GPS定位中��,經(jīng)常采用下列觀測值中的一種或幾種進(jìn)行數(shù)據(jù)處理��,以確定出待定點(diǎn)的坐標(biāo)或待定點(diǎn)之間的基線向量:
L1載波相位觀測值
L2載波相位觀測值(半波或全波)
調(diào)制在L1上的C/A碼偽距
調(diào)制在L1上的P碼偽距
調(diào)制在L2上的P碼偽距
L1上的多普勒頻移
L2上的多普勒頻移
實(shí)際上���,在進(jìn)行GPS定位時,除了大量地使用上面的觀測值進(jìn)行數(shù)據(jù)處理以外��,還經(jīng)常使用由上面的觀測值通過某些組合而形成的一些特殊觀測值��,如寬巷觀測值(Wide-Lane)�����、窄巷觀測值(Narrow-Lane)����、消除電離層延遲的觀測值(Ion-Free)來進(jìn)行數(shù)據(jù)處理。
GPS的誤差
我們在利用GPS進(jìn)行定位時�����,會受到各種各樣因素的影響。影響GPS定位精度的因素可分為以下四大類:
人為
美國政府從其國家利益出發(fā)�,通過降低廣播星歷精度( 技術(shù))、在GPS基準(zhǔn)信號中加入高頻抖動( 技術(shù))等方法�,人為降低普通用戶利用GPS進(jìn)行導(dǎo)航定位時的精度。
衛(wèi)星星歷誤差
在進(jìn)行GPS定位時���,計算在某時刻GPS衛(wèi)星位置所需的衛(wèi)星軌道參數(shù)是通過各種類型的星歷[7]提供的���,但不論采用哪種類型的星歷,所計算出的衛(wèi)星位置都會與其真實(shí)位置有所差異�����,這就是所謂的星歷誤差�。
衛(wèi)星鐘差
衛(wèi)星鐘差是GPS衛(wèi)星上所安裝的原子鐘的鐘面時與GPS標(biāo)準(zhǔn)時間之間的誤差�。
衛(wèi)星信號發(fā)射天線相位中心偏差
衛(wèi)星信號發(fā)射天線相位中心偏差是GPS衛(wèi)星上信號發(fā)射天線的標(biāo)稱相位中心與其真實(shí)相位中心之間的差異。
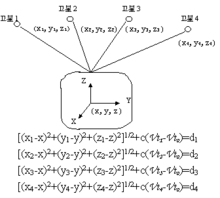
GPS定位的基本原理是根據(jù)高速運(yùn)動的衛(wèi)星瞬間位置作為已知的起算數(shù)據(jù)�,采用空間距離后方交會的方法,確定待測點(diǎn)的位置���。如圖所示���,假設(shè)t時刻在地面待測點(diǎn)上安置GPS接收機(jī)����,可以測定GPS信號到達(dá)接收機(jī)的時間△t��,再加上接收機(jī)所接收到的衛(wèi)星星歷等其它數(shù)據(jù)可以確定以下四個方程式: 上述四個方程式中待測點(diǎn)坐標(biāo)x�、 y、 z 和Vto為未知參數(shù)����,其中di=c△ti (i=1、2����、3、4)����。
di (i=1、2���、3�����、4) 分別為衛(wèi)星1�、衛(wèi)星2、衛(wèi)星3�、衛(wèi)星4到接收機(jī)之間的距離。
△ti (i=1���、2�、3����、4) 分別為衛(wèi)星1、衛(wèi)星2��、衛(wèi)星3�����、衛(wèi)星4的信號到達(dá)接收機(jī)所經(jīng)歷的時間��。
c為GPS信號的傳播速度(即光速)���。
四個方程式中各個參數(shù)意義如下:
x、y�����、z 為待測點(diǎn)坐標(biāo)的空間直角坐標(biāo)。
xi ��、yi �����、zi (i=1��、2����、3、4) 分別為衛(wèi)星1���、衛(wèi)星2��、衛(wèi)星3���、衛(wèi)星4在t時刻的空間直角坐標(biāo),
可由衛(wèi)星導(dǎo)航電文求得�。
Vt i (i=1、2��、3、4) 分別為衛(wèi)星1�、衛(wèi)星2、衛(wèi)星3����、衛(wèi)星4的衛(wèi)星鐘的鐘差,由衛(wèi)星星歷提供��。
Vto為接收機(jī)的鐘差�。
由以上四個方程即可解算出待測點(diǎn)的坐標(biāo)x、y�����、z 和接收機(jī)的鐘差Vto �����。
事實(shí)上��,接收機(jī)往往可以鎖住4顆以上的衛(wèi)星�����,這時��,接收機(jī)可按衛(wèi)星的星座分布分成若干組�,每組4顆,然后通過算法挑選出誤差最小的一組用作定位�����,從而提高精度����。
由于衛(wèi)星運(yùn)行軌道、衛(wèi)星時鐘存在誤差���,大氣對流層��、電離層對信號的影響�,以及人為的SA保護(hù)政策���,使得民用GPS的定位精度只有100米���。為提高定位精度,普遍采用差分GPS(DGPS)技術(shù)����,建立基準(zhǔn)站(差分臺)進(jìn)行GPS觀測����,利用已知的基準(zhǔn)站精確坐標(biāo)���,與觀測值進(jìn)行比較���,從而得出一修正數(shù),并對外發(fā)布���。接收機(jī)收到該修正數(shù)后����,與自身的觀測值進(jìn)行比較����,消去大部分誤差,得到一個比較準(zhǔn)確的位置����。實(shí)驗(yàn)表明,利用差分GPS��,定位精度可提高到5米。
車用導(dǎo)航系統(tǒng)主要由導(dǎo)航主機(jī)和導(dǎo)航顯示終端兩部分構(gòu)成���。內(nèi)置的GPS天線會接收到來自環(huán)繞地球的24顆GPS衛(wèi)星中的至少3顆所傳遞的數(shù)據(jù)信息����,由此測定汽車當(dāng)前所處的位置��。導(dǎo)航主機(jī)通過GPS衛(wèi)星信號確定的位置坐標(biāo)與電子地圖數(shù)據(jù)相匹配����,便可確定汽車在電子地圖中的準(zhǔn)確位置���。
在此基礎(chǔ)上��,將會實(shí)現(xiàn)行車導(dǎo)航��、路線推薦�����、信息查詢���、播放AV/TV等多種功能。駕駛者只須通過觀看顯示器上的畫面、收聽語音提示��,操縱手中的遙控器即可實(shí)現(xiàn)上述功能�����,從而輕松自如地駕車���。